R2D2 LED display vezérlőmodul fejlesztés
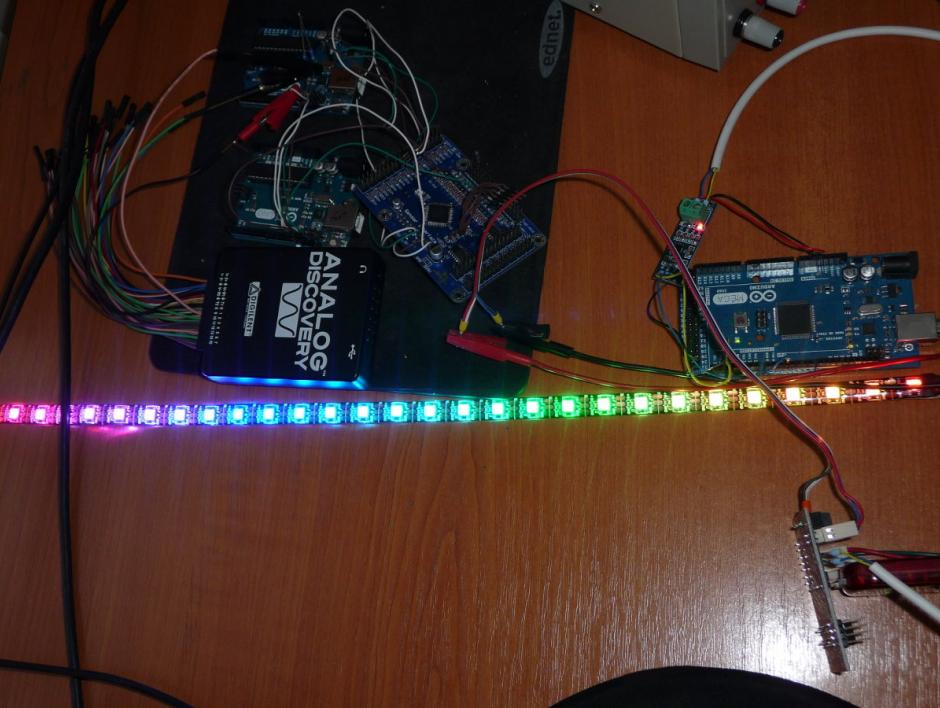
Az R2D2 projekt részeként a szenzor panel kifejlesztését követően a roboton elhelyezett LED kijelzők és fények vezérlésén még nem dolgozott senki, így ennek az egységnek a kifejlesztését is én végeztem. A szenzor panelnél megismert kommunikációs protokollt kellett ebben az esetben is alkalmazni, így ezzel az előnnyel már hamarabb el tudtam készülni a munkával, mintha még akkor ismerkedtem volna a feltételekkel.
A robot több pontján is szükséges volt visszajelző fények, kijelzők, környezeti megvilágító lámpák alkalmazása. Ezek korszerűen és túlnyomó részben intelligens RGB LED diódákkal valósultak meg. Mivel az elektronikai rendszer modulokból áll össze és a robot minden egyes alsóbb szintű feladatának ellátásáért egy-egy modul gondoskodik, ezeket a különálló rendszereket egy felsőbb intelligencia irányítja, kérdezi le. A kommunikációra egy RS485 busz lett kialakítva, melyhez részletes kommunikációs specifikáció került kidolgozásra, így mindenki egymástól függetlenül tudott dolgozni a saját feladatán, csupán alkalmazkodni kellett ezen specifikációban leírtakhoz, melyek betartása garantálta azt, hogy az összekapcsoláskor minden egység hibátlanul tudjon dolgozni.


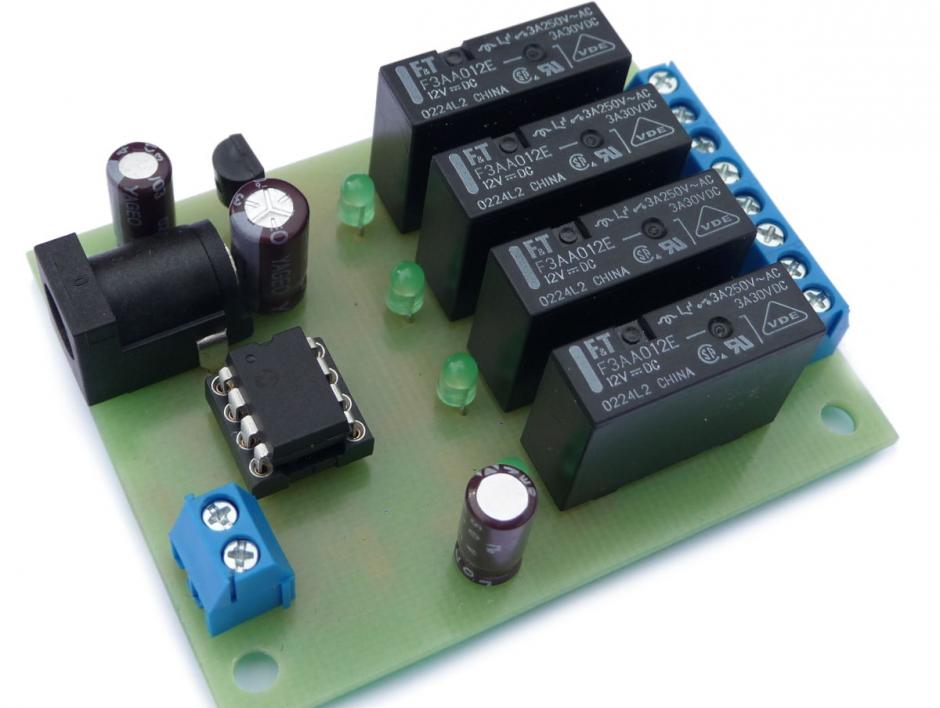



Elalvásgátló autósok számára
P1080742_1200.JPG
Egy informatikai cég által fejlesztett mobilalkalmazás kiegészítéseként készült el ez a kicsi és viszonylag egyszerű elektronikai egység, mely gyakorlatilag egy DTMF jelre aktiválható kapcsoló.
Egy mobiltelefonon futó alkalmazás a felhasználói felületén valamennyi funkciót képes megvalósítani, mely azt a célt szolgálja, hogy a sofőr ne aludhasson el a volán mellett vezetés közben. Abban az esetben, ha ez mégis bekövetkezne, arra már egy ilyen program nem képes, hogy egy ébresztő jelzésen túl be is tudjon avatkozni a folyamatokba. Szerencsésebb esetben a jelzése felébreszti a sofőrt, így a baj elkerülhető. Szerencsétlenebb esetben előfordulhat, hogy a jelzés ellenére sem reagál az autó vezetője. Ez akár egy hirtelen rosszullét miatt is bekövetkezhet. Ilyen esetben az autót célszerű valamilyen automatizált módon leállítani.